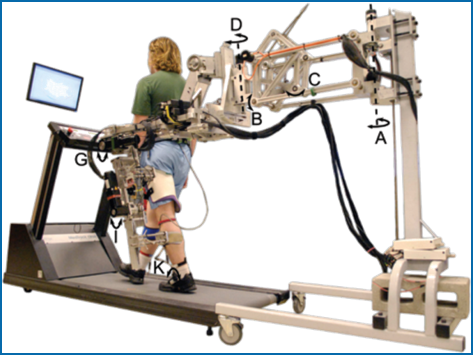
C-ALEX, a cable-driven unilateral leg exoskeleton designed for gait

Comparing the Performance of a Cable-Driven Active Leg Exoskeleton (C-ALEX) Over-Ground and on a Treadmill

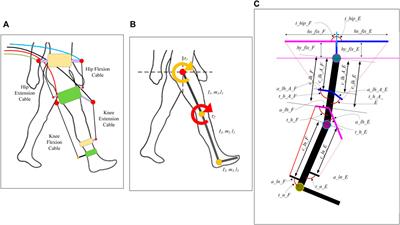
Biomechanical design and control of an eight DOF human lower extremity rehabilitation exoskeleton robot - ScienceDirect

Gait Adaptation Using a Cable-Driven Active Leg Exoskeleton (C-ALEX) With Post-Stroke Participants

Victor GROSU, Doctor of Engineering, Vrije Universiteit Brussel, Brussels, VUB, Applied Mechanics (MECH)

C-ALEX, a cable-driven unilateral leg exoskeleton designed for gait
ALEX Roar Lab

Comparing the Performance of a Cable-Driven Active Leg Exoskeleton (C-ALEX) Over-Ground and on a Treadmill

Retraining of Human Gait - Are Lightweight Cable-Driven Leg Exoskeleton Designs Effective?
Actuators, Free Full-Text
Frontiers A Framework for Determining the Performance and Requirements of Cable-Driven Mobile Lower Limb Rehabilitation Exoskeletons
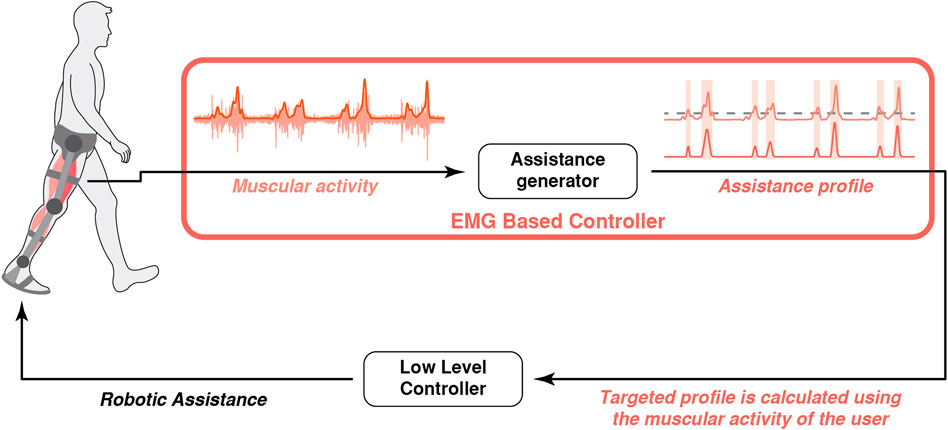
Frontiers Coordination Between Partial Robotic Exoskeletons and Human Gait: A Comprehensive Review on Control Strategies







