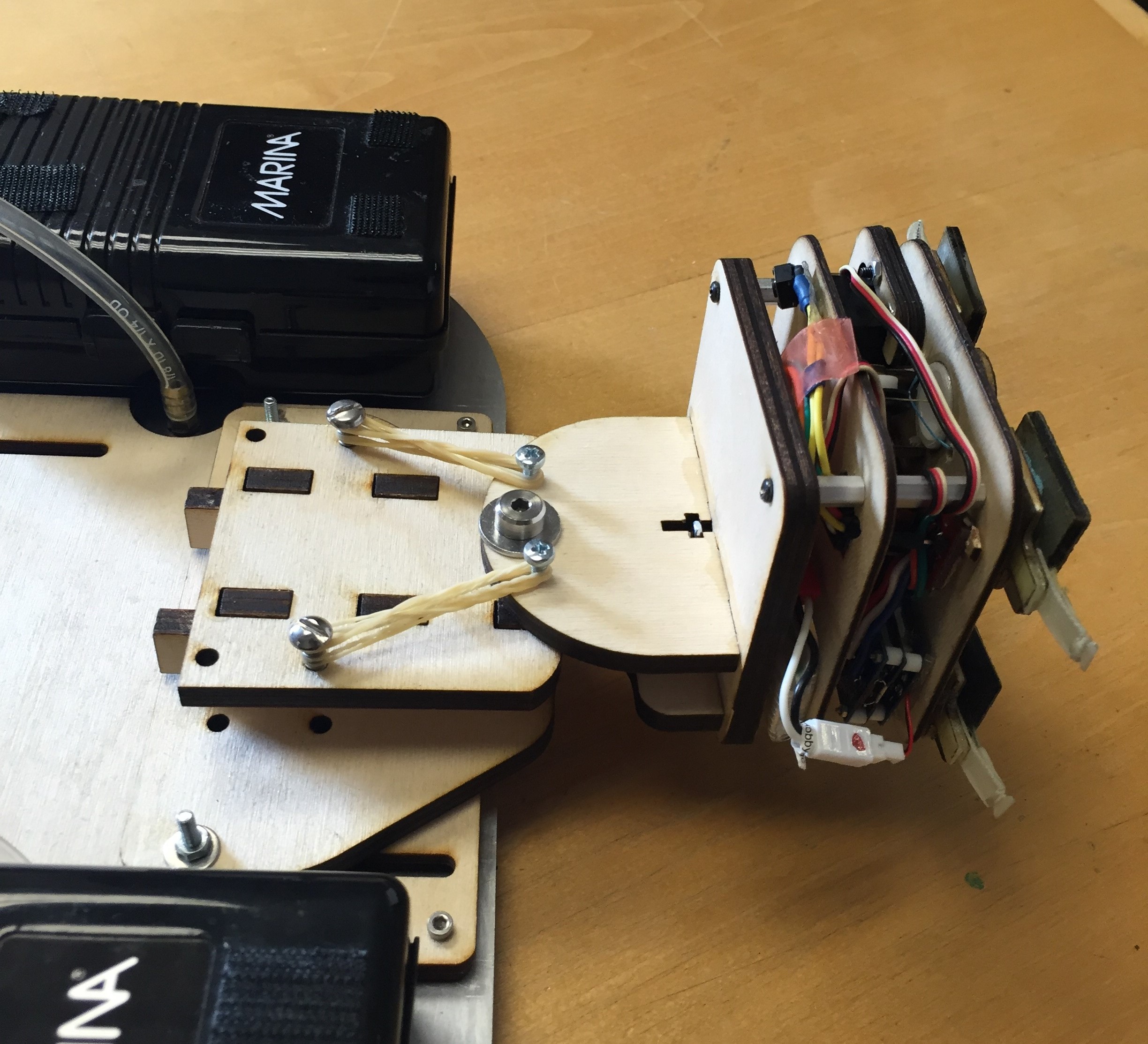
The final design constrains gripper travel using a pair of bearing

Download scientific diagram | The final design constrains gripper travel using a pair of bearing shafts. from publication: Axiomatic Design of a Linear Motion Robotic Claw with Interchangeable Grippers | Reykjavik University's electronic lab has a five-axis CRS Robotics A255 arm used in laboratory exercises that are in need of an improved claw. The current claw limits the robot arm operation duration and dexterity due to its bulk. In addition, the grippers don’t provide a | Axiomatic Design, Robotics and Physical Exercise | ResearchGate, the professional network for scientists.

US11224497B2 - Surgical systems with multiple RFID tags - Google Patents

Active debris removal: A review and case study on LEOPARD Phase 0-A mission - ScienceDirect

The final design constrains gripper travel using a pair of bearing

Design, development and evaluation of an ergonomically designed dual-use mechanism for robot-assisted cardiovascular intervention

Topic4Linkages GW

The final design constrains gripper travel using a pair of bearing

PDF) A Novel Discrete Variable Stiffness Gripper Based on the Fin Ray Effect

Download - DPN Staff

Cosmoclench Gripper, PDF, Screw
the design of an underactuated wheelchair-mounted - UMass Lowell

Cosmoclench Gripper, PDF, Screw
The final design of the compliant gripper.
ChrisKimesSummerBlog Biomimetics and Dextrous Manipulation Lab







